

What are the specific parameters for communicating with servo motors?
AC servo motors have the characteristics of high precision, high response speed, and high stability, and are widely used in various automation control systems.
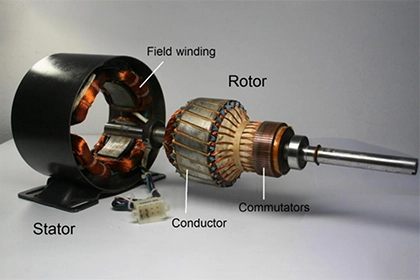
An AC servo motor is a device that converts electrical energy into mechanical energy. It mainly consists of a stator and a rotor. When AC power is applied to the stator, a rotating magnetic field is generated, and the rotor rotates and outputs mechanical energy under the action of the rotating magnetic field. AC servo motors have the characteristics of high precision, high response speed, and high stability and are widely used in various automation control systems.

Why are AC servo motors widely used?
In the communication of servo motors, parameters such as the rotor's moment of inertia, maximum torque, and response time can be adjusted according to actual needs to meet the requirements of different systems. At the same time, there are various control methods for AC servo motors, which can achieve precise control and adjustment through controllers, enabling complex motion and operations. Compared with DC servo motors, AC servo motors have higher efficiency and a longer service life. They also do not require maintenance or replacement of brushes, providing better reliability and stability. Therefore, in many high-precision, high-efficiency, and high-reliability applications, AC servo motors have become the preferred driving method.
Parameters of AC servo motor
The communication servo motor is an important component of the servo system, and its performance directly affects the accuracy, stability, and response speed of the servo system. The specific parameters of communication servo motors can be divided into two categories: structural parameters and control parameters. Structural parameters mainly include stator resistance, inductance, mutual inductance, rotor resistance, and moment of inertia, which determine the mechanical characteristics and control the accuracy of the motor.
Structural parameters
- Rated power: The rated power of a motor is usually expressed in kilowatts (kW) or watts (W). Rated power refers to the maximum power that the motor can continuously operate at rated voltage and frequency.
- Rated voltage: The rated voltage of a motor is usually expressed in volts (V). The rated voltage refers to the voltage at which the motor can operate normally under rated power.
- Rated current: The rated current of a motor is usually expressed in amperes (A). Rated current refers to the maximum current that the motor can continuously operate at under rated power and voltage.
- Rated speed: The rated speed of a motor is usually expressed in revolutions per minute (r/min). The rated speed refers to the maximum speed at which the motor can continuously operate under rated power and voltage.
- Moment of inertia: The moment of inertia of a motor is usually expressed in kilograms per square meter (kg/m2). The moment of inertia refers to the inertia possessed by the rotor of the motor when it is suddenly started or stopped.
- Maximum Torque: The maximum torque of the motor is usually expressed in Newton·meters (N·m). The maximum torque refers to the maximum torque that the motor can generate at rated voltage and frequency.
- Response Time: The response time of a motor refers to the time it takes for the motor to reach maximum torque from the start of the input signal. The shorter the response time, the faster the motor's response speed.
- Position Accuracy: The position accuracy of a motor refers to the level of precision the motor can achieve with the assistance of an encoder. The higher the position accuracy, the higher the control precision of the motor.
- Speed Accuracy: The speed accuracy of the motor refers to the speed control precision that the motor can achieve with the cooperation of the encoder. The higher the speed accuracy, the better the stability of the motor.
- Overload capacity: The overload capacity of a motor refers to the overload torque that the motor can withstand in a short period of time. The stronger the overload capacity, the better the motor's load-bearing capacity.
Control parameters
Control parameters mainly include control voltage, control current, control loop gain, etc., which determine the control mode and performance of the motor. Specifically, the main functions of some key parameters of communication servo motors are as follows:
- Current loop PI parameters: This parameter is mainly used to adjust the current loop of the motor, including armature current, bus voltage, flux, etc. By adjusting the current loop PI parameters, the torque and speed of the motor can be controlled, and overload protection can also be applied to the motor.
- Speed loop PI parameters: This parameter is mainly used to adjust the speed loop of the motor, including speed setpoint, speed feedback, motor speed, etc. By adjusting the speed loop PI parameters, the speed and acceleration of the motor can be controlled, and speed limitation and protection can also be applied to the motor.
- Position loop PI parameters: This parameter is mainly used to adjust the position loop of the motor, including position setpoint, position feedback, motor position, etc. By adjusting the position loop PI parameters, the position accuracy and smoothness of the motor can be controlled, and the motor can also be limited and protected in terms of position.
- Electronic gear ratio: This parameter is mainly used to adjust the pulse equivalent of the motor, which is the number of pulses required for the motor to rotate one revolution. By adjusting the electronic gear ratio, the resolution and accuracy of the motor can be controlled, and speed limitation and protection can also be applied to the motor.
- Rotor resistance and moment of inertia: These two parameters determine the mechanical characteristics and control the accuracy of the motor. The larger the rotor resistance, the lower the motor speed; the larger the moment of inertia, the slower the motor's response speed. By adjusting these two parameters, it is possible to achieve a wide speed range, linear mechanical characteristics, and fast response performance for the motor.
- Auto-tuning mode: This parameter is mainly used to automatically adjust various parameters of the motor, including current loop PI parameters, speed loop PI parameters, position loop PI parameters, etc. By enabling the auto-tuning mode, the motor can automatically optimize various parameters after power-on, improving the control accuracy and performance of the motor.
In conclusion, the specific parameters of communication servo motors have a significant impact on the motor's performance and control accuracy, and they need to be adjusted and set reasonably according to the actual application scenarios.
Leave a Comment