

Selecting Motors for Robotics Grippers
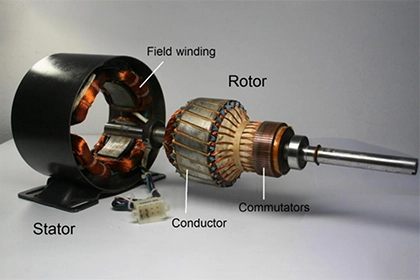
Electric motors are commonly used in robotics grippers due to their precise control, compact size, and ability to generate sufficient force for gripping objects of varying sizes and weights.
In modern society, technological development is rapid, and automation production is gradually becoming an important part of industrial production. Common production equipment in automated production is the robotic arm, which can accurately perform some repetitive tasks. They are usually equipped with grippers at the end, and the grippers usually rely on motors or actuators to achieve their gripping and release functions. Therefore, the performance of the motor largely determines the performance of the robotic arm. When selecting a motor for a robot gripper, several factors need to be considered. This article discusses the factors to be considered when selecting a gripper motor and some precautions.
Introduction to Robot Grippers
Robotics grippers are mechanical devices or end-effectors designed to grasp and manipulate objects in robotic systems. Grippers come in various types and designs, including parallel jaw, three-fingered, suction, and robotic hands that mimic human dexterity. The primary function of robotics grippers is to securely grasp objects of different shapes, sizes, and materials, enabling robots to perform tasks such as pick-and-place operations, assembly, packaging, and material handling. Grippers may incorporate sensors for detecting object presence, force feedback, or adaptive gripping. The choice of gripper depends on the specific application requirements, including the object's characteristics, desired gripping force, precision, and the robot's capabilities.
Factors to Consider
- Torque
Torque is a crucial parameter for robotics grippers as it determines the gripping force that the gripper can exert on an object. The torque requirement depends on the weight and characteristics of the objects to be handled. To calculate the required torque, you can use the formula: T = F × r. The force is the weight of the object, and the distance is the distance from the gripper's center of rotation to the object's center of gravity.
- Speed
The speed requirement of the motor depends on the application and the desired gripping speed. It is important to choose a motor that can provide the necessary speed range for efficient operation. The speed can be calculated by dividing the distance traveled by the gripper by the time taken to complete the movement.
- Control Mode
The control mode refers to how the motor is controlled. There are various control modes available, such as open-loop control and closed-loop control. Open-loop control is simpler and less expensive but may not provide precise positioning. Closed-loop control, on the other hand, uses feedback sensors to ensure accurate positioning and control. The choice of control mode depends on the required precision and the complexity of the application.
- Size and Weight
The size and weight of the motor are important considerations, especially in robotics applications where space and weight constraints are common. It is essential to choose a motor that fits within the available space and does not add excessive weight to the gripper, which could affect the overall performance and efficiency of the robot.
Other Parameters
The above factors broadly determine the basic performance of a robot gripper, but if you want to consider more factors further, you can also refer to the following factors:
- Output Power
Output power is linked to the torque and speed of the motor, indicating the motor's capability to perform work over time. A motor with inadequate power might stall or fail to operate the gripper effectively, while an overpowered motor increases cost and energy consumption unnecessarily.
- Power Supply
The choice of power supply (voltage level and type — AC or DC) directly impacts motor selection. The motor must be compatible with the available power supply on the robot system to ensure operational efficiency without additional converters or adapters, which can introduce losses or reliability issues.
- Operating Environment
The operating environment considerations include temperature, humidity, exposure to contaminants or corrosive materials, and water ingress. Motors with a high IP rating are essential for harsh environments to protect against dust and water, preventing premature wear or failure.
Example Calculation: Torque for a Gripper Motor
Suppose a gripper needs to hold a 2kg object securely. Assuming the coefficient of friction between the gripper and the object is 0.5, and the gripper applies the force 4 cm from the pivot point, the minimum torque needed can be estimated:
Therefore, a motor providing at least 0.392Nm of torque would be required to hold the object securely.
Considerations
It is important to note that the hazards of parameters being too high or too low depend on the specific application and requirements. For example, if the torque is too low, the gripper may not be able to securely hold objects, leading to potential dropping or slipping. Conversely, if the torque is too high, it may cause excessive stress on the gripper mechanism or the objects being handled. Similarly, selecting the wrong control mode or inadequate protection level can result in unreliable operation or damage to the motor.
Conclusion
There are several parameters to consider when selecting a motor for a robotic gripper to ensure that the gripper operates efficiently and reliably and is able to perform the required tasks without over-specifying the motor and adding unnecessary costs.
Leave a Comment